Reinforcement Learning
Reinforcement Learning
Policy learning that blends neuromorphic hardware, simulators, and human-in-the-loop safety constraints for real-world actuation.
- Reward-modulated STDP controllers for spiking and analog robots
- Safe RL protocols for medical, assistive, and rehab devices
- Sim-to-real transfer stacks with telemetry-aware monitoring
Research Area Overview
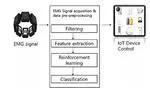
Our reinforcement learning (RL) portfolio spans curriculum design, imitation learning, and real-world deployment. We develop agents that can reason over biosignals and sensory data, then act through robotic manipulators, rehabilitation devices, or clinical decision-support workflows.
Focus Topics
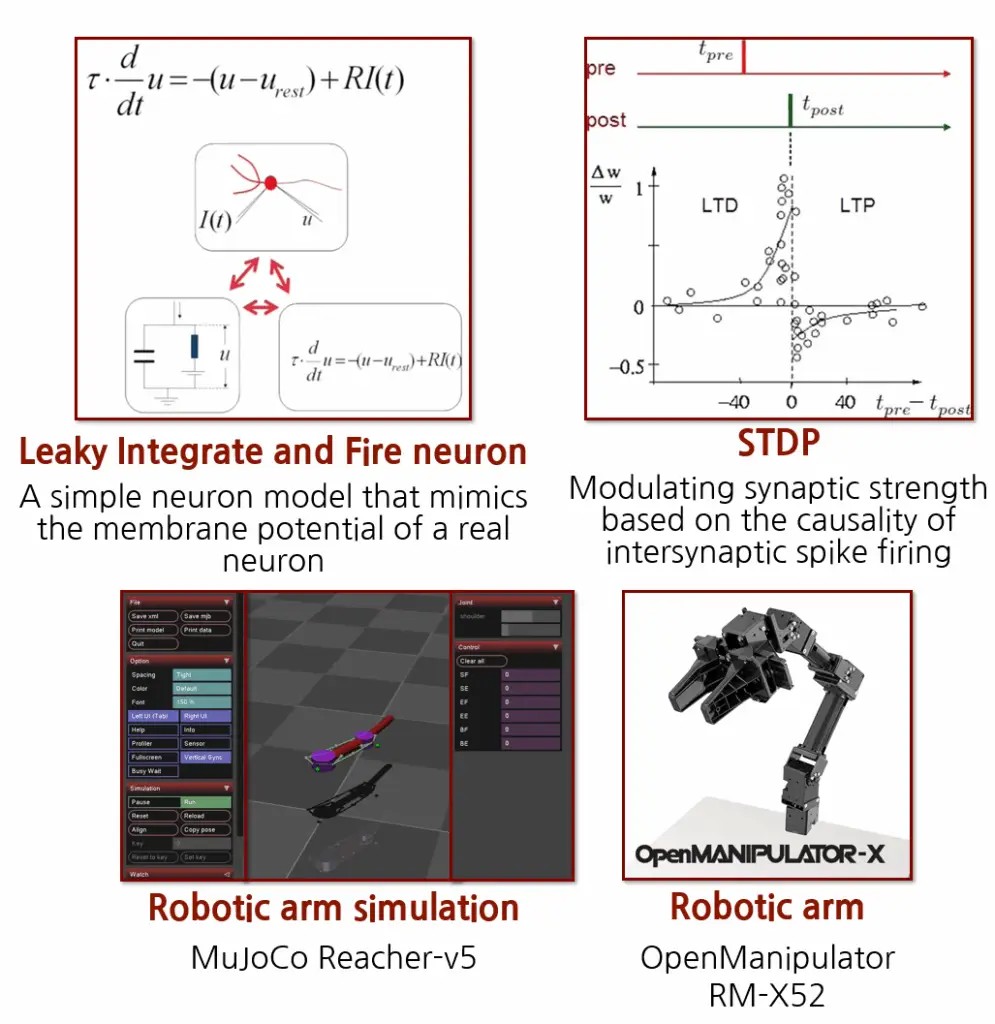
- Reward-modulated spike-timing-dependent plasticity (R-STDP) for neuromorphic policies
- Safe RL strategies that respect human-in-the-loop constraints
- Hybrid RL + control architectures for medical and service robots
- Sim-to-real pipelines with photorealistic simulation assets