RL-driven EMG Feature Selection
 Policy agent ranks EMG-derived descriptors for prosthetic control.
Policy agent ranks EMG-derived descriptors for prosthetic control.Summary
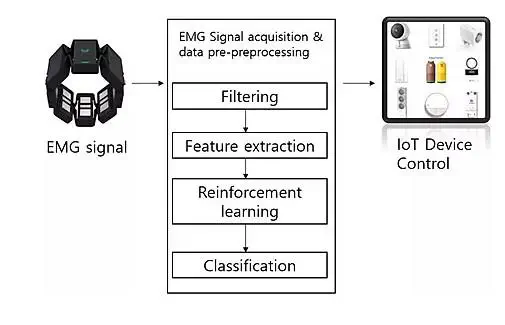
Surface myoelectric (EMG) signals are notoriously noisy, yet they encode the intent required to control upper-limb prostheses and rehabilitation robots. We framed feature selection as a reinforcement learning problem: the agent iteratively selects high-value EMG descriptors, receiving rewards when downstream classifiers improve.
Highlights
- Produces compact, high-performing feature sets for SVM and Random Forest classifiers
- Accelerates adaptation to new users and electrode placements
- Demonstrates how RL can directly optimize biosignal pipelines prior to model training
Description
Analysis of EMG signal has been an interested topic in recent years for classifying surface myoelectric signal patterns. Myoelectric control is an unconventional method to control the upper limb prostheses, human assisting robots and rehabilitation devices.
Cheolsoo Park
Professor
His research interests include machine learning, adaptive signal processing, computational neuroscience, and wearable technology.